NSF Engineering Research Center for Human AugmentatioN via Dexterity (HAND)
The work of the NSF ERC for Human AugmentatioN via Dexterity (HAND) will lead to versatile, dexterous robotic arms and hands that address a broad range of human, industry, and societal needs. The purpose is to create robot manipulators that are widely useful “out of the box.” Today, robot arms become useful only after an expensive integration process, making them inaccessible to many who might benefit, including most of the country’s quarter-million small and medium-sized enterprises. To be useful out of the box, robots must have truly versatile end-effectors (“hands”), AI-powered dexterous skills, and intuitive interfaces that trained workers can use immediately. Training must be widely accessible and career paths must be available to learners from a young age. Firms of all sizes must be able to adopt these robots, and workers of all education levels, high school through postgraduate, must be able to use them.

The breadth and structure of the ERC program will enable HAND to address these technical, workforce, and ecosystem challenges, ultimately democratizing access to robot dexterity. Robots will no longer be limited to high-volume, highly repeatable operations; they will find application in low-volume high-mix manufacturing, food processing, remote handling of precious or dangerous materials, assistance for individuals with motor impairments, and many other areas. The Center will bring together experts in materials, manufacturing, manipulation, soft robotics, artificial intelligence, machine perception, modeling, haptics, human-robot interaction, participatory design and research, team science, education, law, and the social sciences to overcome fundamental barriers to dexterity. These include achieving large-scale integration of actuators and sensors, building robust visuo-tactile-motor skills that are composable into complex behaviors, and low-code programming by non-roboticists. The result will be an engineered system–hands, skills, interface, and training materials–that dramatically advances robotic manipulation and its accessibility to diverse user populations. Read more …
Development of Autonomous External Pipeline Inspection Robot for Oil and Gas Multidirectional Pipelines
In this project, novel autonomous out-pipe defects inspection robots are developed. The robots are to be used for health monitoring and defect detection in external oil and gas pipelines. The robots will be equipped with sensors and a data acquisition system capable of wirelessly relaying information gathered by the various sensors to a personal computer.

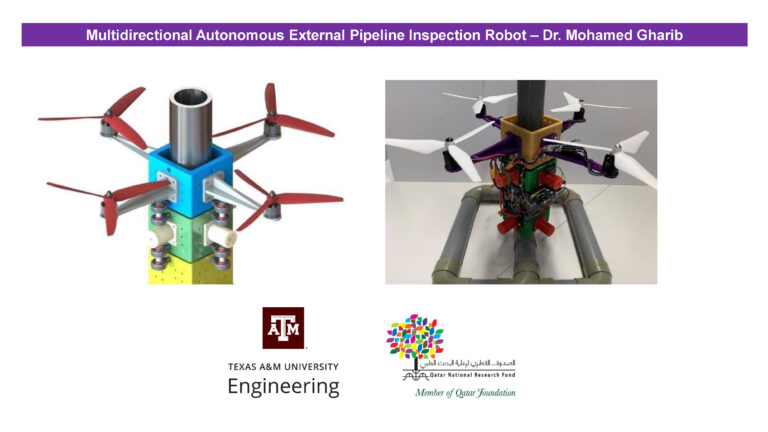

The proposed robots have the following features: (1) Detection of cracks, corrosion, pitting, and wall thinning; (2) Capability of autonomous scanning; (3) Adaptation to different pipe sizes and capability to measure multiple outer diameters; (4) Capability to carry multiple sensors that operate simultaneously; (5) Maintenance of a precise distance between the sensors and the pipe surface. The proposed design will provide an innovative, effective, economical, and easy-to-install solution to the oil and gas industry, which spends millions of dollars on pipeline failures and lost production time. Therefore, accurate and efficient pipe inspection is extremely important to the oil and gas industry.
Full Scale, High Temperature and High Pressure Industry Test-bed for Increased Horizontal and Vertical Drilling Efficiency and Reliability
In this project, a full-scale, industrial-size, and high pressure – high temperature (HPHT) drillstring test rig will be designed, build and tested. The research team will build a test rig which accurately replicates the downhole environment with regards to bit performance limiters. By having a facility which has a long, limber drillstring, a pressurized rock-bit interface and the ability to easily replicate specific scenarios; it is a step change in drilling research. Replicating the downhole HPHT conditions in a drilling test rig on the surface is a daunting challenge, which makes the proposed rig a very unique and valuable research commodity.
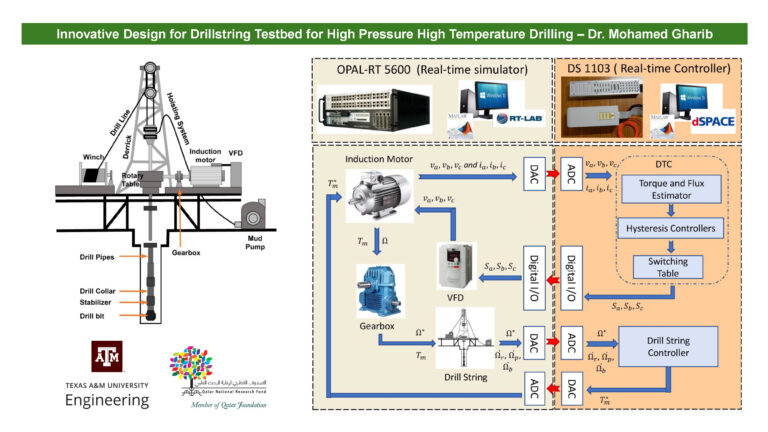
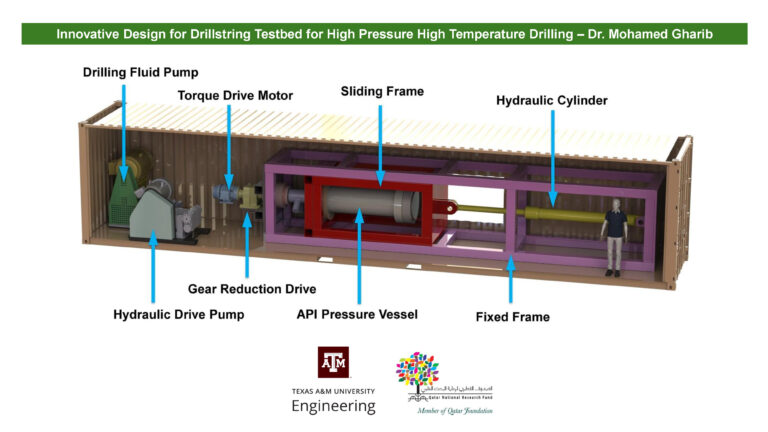

The developed test rig will provide these test conditions for developing longer lasting and more efficient bits, more effective drilling fluids, lower friction tool joints to increase WOB and ROP, automated drilling approaches and coding that will help to prevent drillstring and bit failures from stick-slip, bit bounce and other drilling anomalies, and increase drilling efficiency. Measured results from the testing will be used to formulate accurate force and torque laws that can be used in drillstring dynamics simulation software for operator training and automated drilling. The proposed test rig gives the industry a unique opportunity to couple experimental work that is representative of downhole conditions with actual industry problems and concerns. By using data sets from actual drilling operations, we will be able to replicate what is occurring downhole but in a controlled, measureable environment on surface. In this project, the proposed test rig will be used to validate: (i) an effective control technique to suppress/reduce the drillstring stick-slip and bit-bounce induced vibrations; (ii) a novel drillbit coating technology to reduce the drillbit-rock friction; (iii) an accurate user-friendly drilling dynamics modeling and analysis software. Figure 0.1 shows the project in a nutshell and research work flow.
Design of Passive and Semi-Active Impact Dampers for Vibration Suppression in Oil/Gas Offshore Platforms
Impact dampers provide an effective, economical, and easy to install solution to the vibration problem in several applications. An impact damper normally consists of a single or a number of masses constrained between two or more stops and attached to a primary system to be controlled. In this project, a new type of impact dampers for vibration suppression for a wide range of infrastructures, ranging from small machines to large buildings, have been developed. The Linear Particle Chain (LPC) impact damper consists of a linear arrangement of two sizes of freely moving masses, constrained by two stops and located on a primary system to be controlled. It is a newly developed impact damper extending the commonly known single-unit impact damper. Due to the difference in sizes of the colliding masses, the multiple impacts among the masses lead to more energy dissipation compared to the conventional impact dampers.
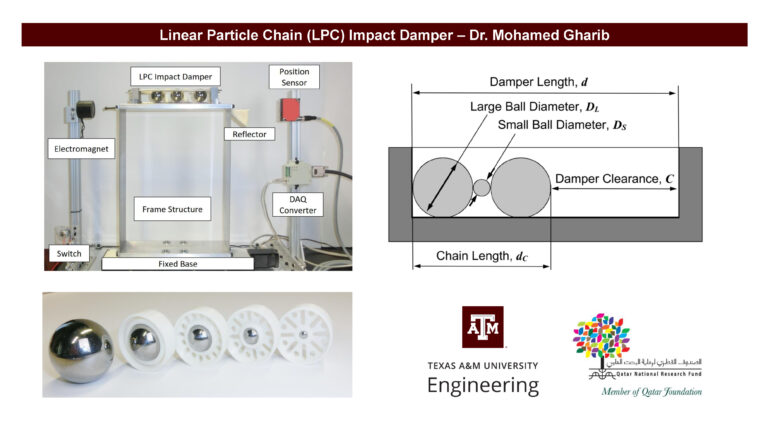
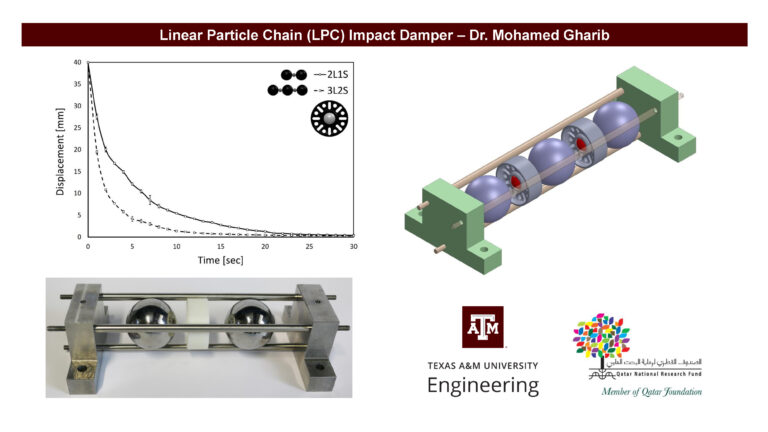
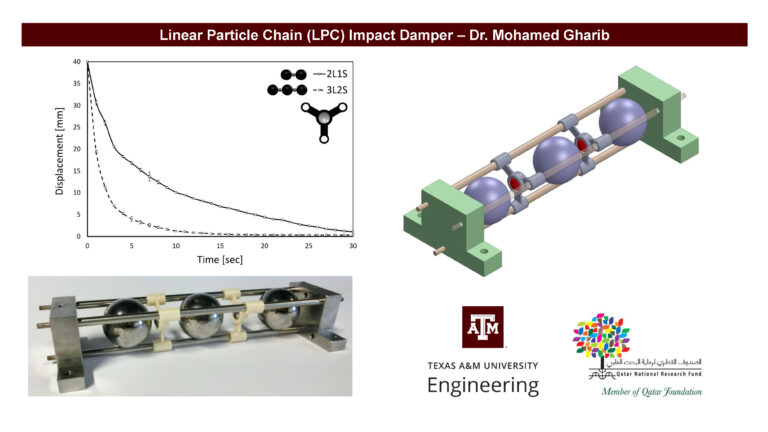
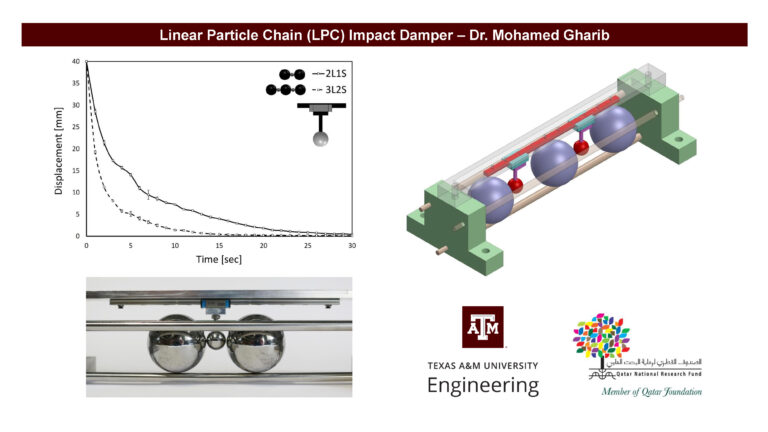
The LPC impact damper is designed, fabricated, and experimentally tested. The experiments are conducted to examine the efficacy of the LPC impact damper in damping the free vibrations of a simple structure. The efficiency of the LPC impact damper is compared with that of single-unit and multi-unit impact dampers. The experimental results clearly show the significant effect of the LPC impact damper in attenuating the structure vibration. The investigations indicate that the performance of the LPC impact damper depends on the mass ratio of the impacting masses, the damper clearance, and the chain length.